

“Light detection and ranging” or, more recently, “laser imaging, detection, and ranging” is what the acronym LIDAR stands for. Moreover, the word “lidar” is utilized broadly across our literature. Lidar calculates the separation between itself and nearby objects in space or on a plane. The measurement produces a point cloud that can be used by autonomously guided vehicles (AGV), service robots, and other robots to navigate. (two minutes of reading)
MIROSLAV PISKOR SOS electronic Product Specialist More articles from the author
Operating principles for LIDAR technology
Triangulation LIDAR
The optics of the receiver focus the radiation reflected from an object when it is within the lowest detectable distance on pixel N. Focused on pixel 1, the radiation reflected from an object at its greatest discernible distance. Since the angles and distances between the laser, the sensor’s optics, and the sensor itself are precisely known, goniometric equations may be used to determine how far away an item is from the LIDAR. An infrared laser with a wavelength of 793 nm is used in LIDAR.
The principle of operation shows that most of the sensor’s pixels are used to measure smaller distances, so the LIDAR measures smaller distances more accurately. For example, for the image above with a sensor with 2048 pixels, approximately 1200 pixels (1pixel = 1.67mm) are used for a range up to 2m, and 848 pixels (1pixel = 9.43mm) are available for a range of 2 to 10m.
In a real LIDAR, the distances and angles are chosen to allow the distance measurement in the required range, for example, for Ydlidar G4 it is 0.28 to 16m with an accuracy of ±20mm for distances <1m and ±2% for range of 1…8m.
A sensitive sensor can be “blinded” more easily, therefore this type of LIDAR is more suitable for indoor use with an illumination intensity of up to 550 Lux, above 2,000 Lux there is already a risk of damage to the sensor. The exception is the Ydlidar X4 Pro, which also works at 2,000 Lux lighting and its maximum is 40,000 Lux.
The laser periodically emits short light pulses in the infrared region. The light reflected from the object is detected by a photodetector. LIDAR measures the time between the emitted pulse and the time when the reflection was detected. LIDAR uses an infrared laser with a wavelength of 905 nm.
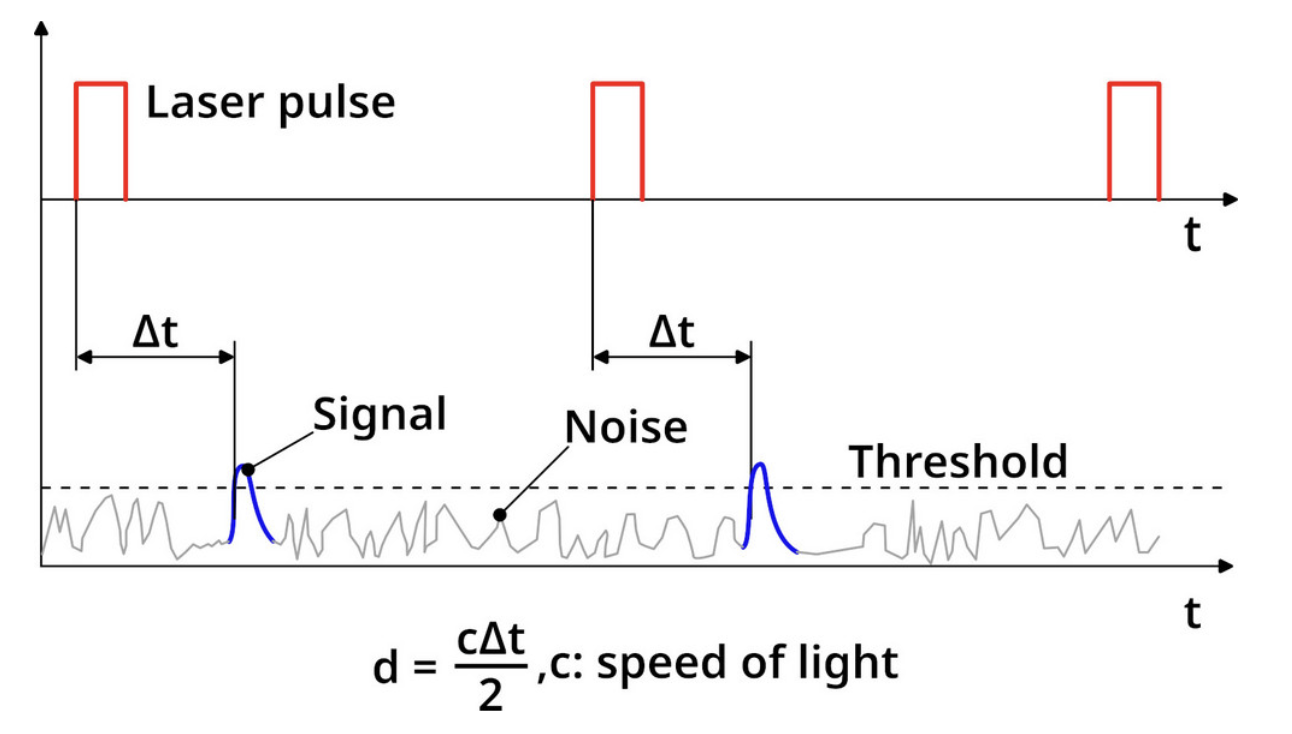
Max. measurable distance is defined by the period T, Dmax. = 0.5cT and the signal/noise ratio. The minimum measurable distance is limited by the accuracy of the time measurement.
If we compare, for example, the accuracy of the LIDAR TG30 and G4, we find out that the G4 is more accurate up to a distance of 3m and TG30 is more accurate for longer distances.
Compared to the sensor used in triangulation LIDARs, the photodetector has a substantially higher resistance to “blinding”. It normally operates at 70,000 Lux and has a maximum tolerance of 100,000 Lux. As a result, it is better suited for outdoor employment.
SOS Electronics’ range includes 2D LIDARs
SOS electronic has included 2D lidars from Ydlidar in their offer. Available models can be found on the website of SOS electronic.
Meaning of important parameters
The upper part of the LIDAR (in which the laser, photodetector, and optics are located) rotates, so the field of view (Horizontal FoV) is 360˚. The rotation speed is typically 5…12 revolutions/s (Motor Frequency) and is adjustable using PWM or command via the UART interface. The measuring frequency (Ranging Frequency) is in the range of 3,000 to 20,000 Hz depending on the type and is not adjustable. At a frequency of 3,000Hz and 6 revolutions/s, the lidar makes 500 measurements per revolution (360˚). This results in another parameter, angle resolution. For this case, the angular resolution is 360/500=0.72˚. The meaning of the other parameters is obvious.
LIDAR: How to Get Started
Each lidar development kit contains the LIDAR itself, a converter from the LIDAR interface (UART, PWM) to USB, and a USB cable. For the Windows operating system, you will need to install the VCP drivers for the CP2102 and download the LidarViewer (TOOL) from the Ydlidar website.
For Linux testing, you will need to install ROS (Robot Operating System) for your Linux distribution, download SDK and driver source codes for a specific LIDAR from the Ydlidar site, and compile and install them. See the user manual for details.
SOS electronic has extended its product offering by the YDlidar range of sensors measuring the distance that have the greatest potential to be successful in many current and future applications. Choose from the range of products available directly from our warehouse. We will be happy to provide you with other LIDARs upon order in a short time and under favorable conditions. You can find more technical information about the individual sensors directly on their website.
Are you interested in more information about YDlidar products or technical advice when choosing a product? Or do you have another question or request? Please contact SOS electronic sales representatives at [email protected].
Do not want to miss out on any technical news? Follow SOS electronic on social media Facebook, LinkedIn, YouTube, Twitter, and Instagram.






